Nodes and CAN network
We can say a node is an individual entity connected or available in the CAN network. A CAN network is made up of a group of nodes. As we
know that the main purpose
of the CAN network is to create or provide a platform over which different ECUs of the vehicle communicate
with each other. So here every individual ECUs can be
described as a node in the CAN network.
CAN Network Diagram:
Below is a simple diagram to represent the nodes available in the CAN network:-
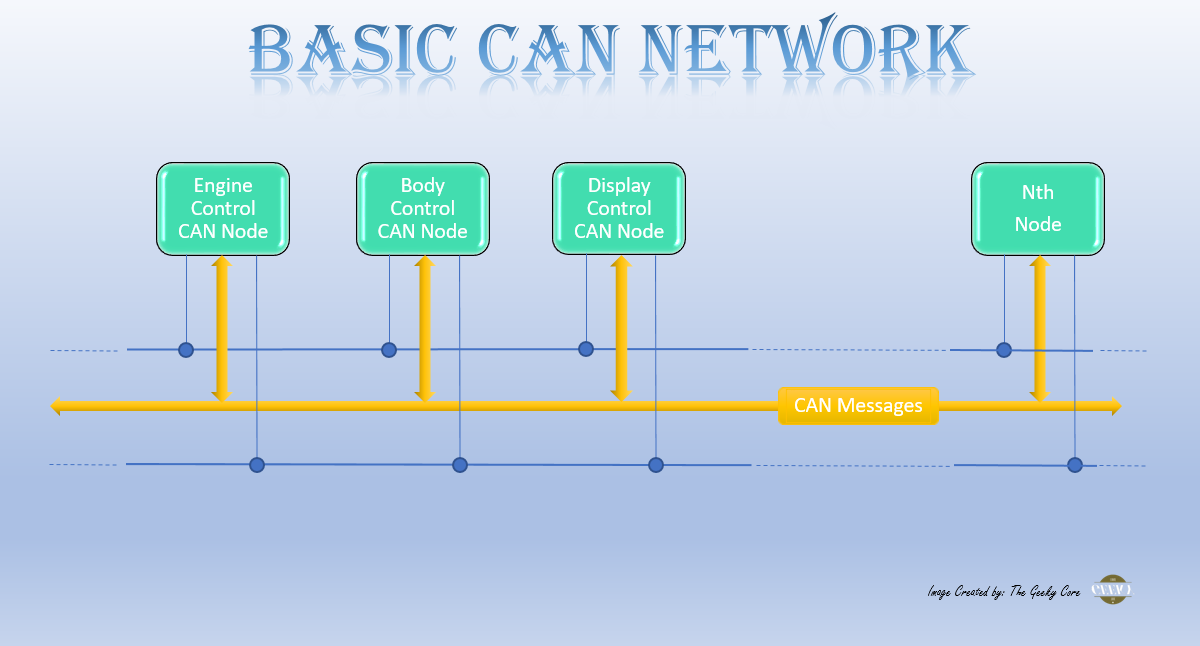
Here every node serves a specific purpose and can communicate with any other nodes. Communication between nodes is carried by the robust
packets
of bits known as "Message" with a predefined transmission speed.
Characteristics or Features of CAN nodes:
Every CAN node in the CAN network are having certain properties. Some of these are as below:
- A CAN node represents a sub-system that ranges from a simple to a complex one.
- A node can be in a continuous operating mode means it can send the signal continuously. An example of this is the BMS(Battery Monitoring System node),
vehicle Engine control node, etc. - A node may be active or put in instruction only when it receives the message for other nodes or the set of instructions to perform the required action.
- Sometimes nodes can be used to detect and inform any error or failure scenarios.
Internal structure of CAN:
We can further dive deep into the internal structural arrangement of a node for a better understanding of its working. Below is the diagrammatical representation of the internal node structure.
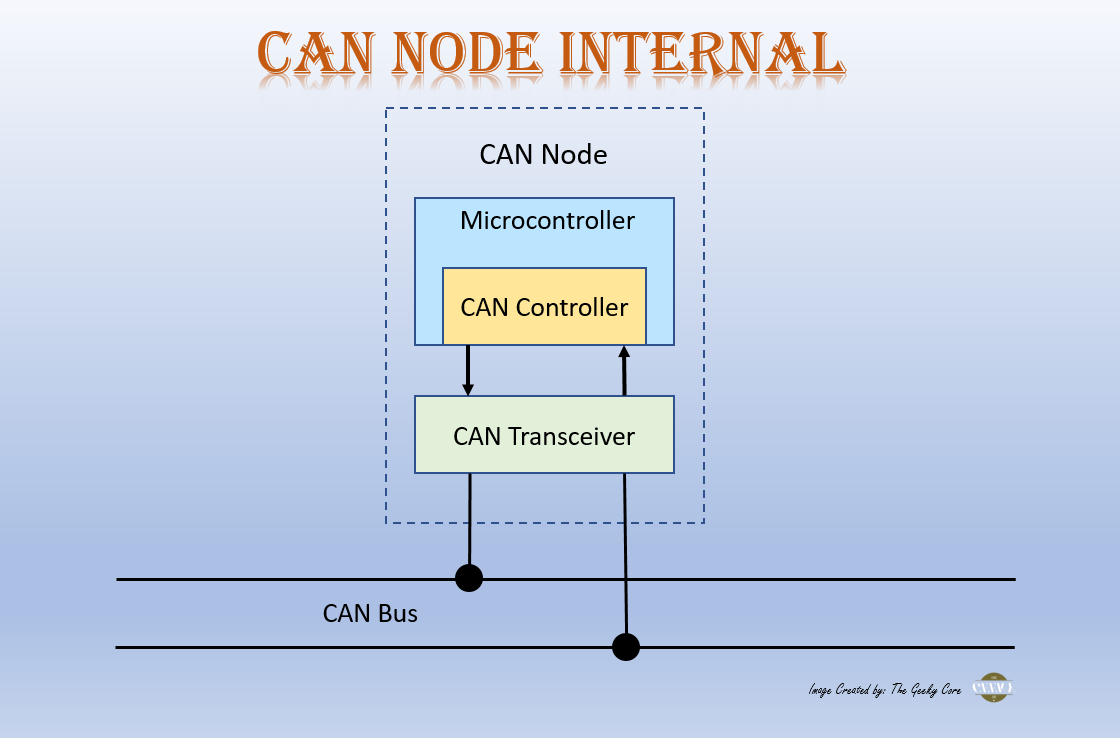
A CAN node consists of below modules:
- Microcontroller - It is the host processor or the main controller of a node subsystem. It can talks directly with the sensors or hardware and fetch the raw data from them.
- CAN Controller - It is an integral part of the microcontroller. It is mainly responsible for exchanging messages between the Microcontroller and the CAN Transceiver.
- Receiving: The CAN controller stores the received serial bits from the bus until an entire message is available, which can then be fetched by the microcontroller.
- Sending: The Microcontroller sends the transmit message(s) to a CAN controller, which transmits the bits serially onto the bus when the bus is free.
- Transceiver - This module is like a doorway through which CAN messages are transmitted and received between a CAN node and the CAN bus and through the CAN bus
the message is transmitted to other nodes.- Receiving: It converts the data stream from CANbus levels to levels that the CAN controller uses.
- Transmitting: It converts the data stream from the CAN controller to CANbus levels.