CAN Introduction
CAN (Controller Area Network):
CAN is the acronym for Controller Area Network which is an integral part of the Automotive industry. CAN is a message-based protocol
that is designed
to allow the different ECUs (Electronic Control Unit) and Sensors in automotive electronics to communicate with each
other without a host computer. If
we consider a modern vehicle, then it contains more than 70-80 ECUs for monitoring and controlling
various subsystems.
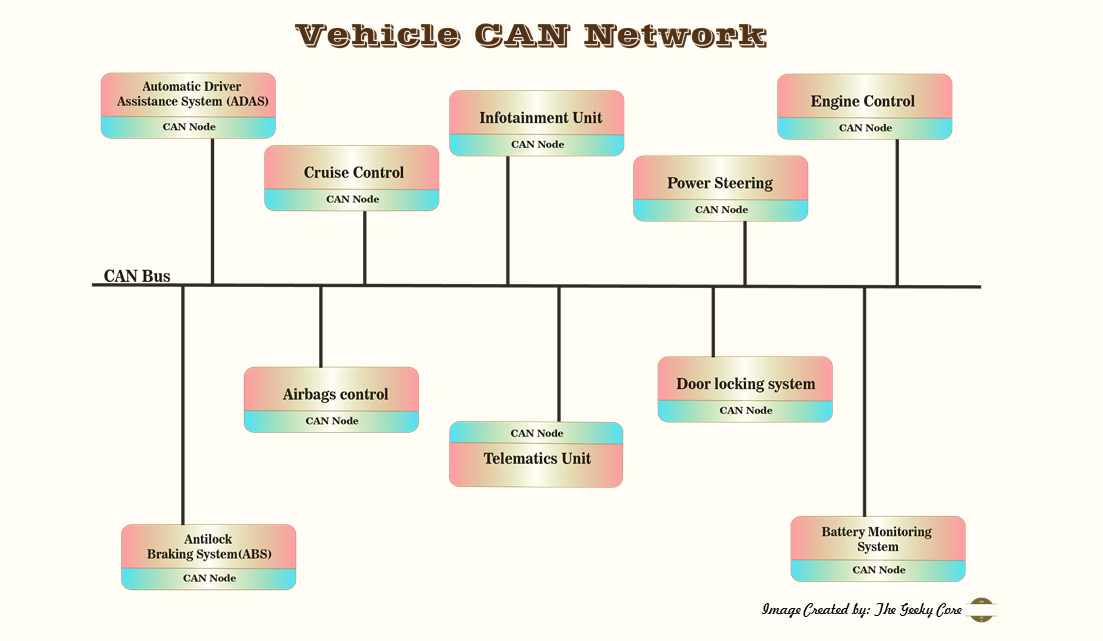
There are various functionality offered by a modern vehicle like Autonomous Driving, Advanced Driver Assistance System (ADAS), Antilock
Braking System(ABS),
Cruise Control, Airbags control, Power Steering, Door locking system, Engine Control, Infotainment, Telematics and
much more. And for the implementation of
each of these functionalities separate ECUs, sensors, and actuators are used to capture and
process the real-time data. However many of these subsystems work
as an independent module, but in order, to the proper functioning of
a Vehicle System as a whole, these ECUs and sensors need to communicate and share their
data. And here the CAN protocol and CAN bus
system came into the picture. It is responsible for smooth and secure communication between different modules.
A simple diagram to demonstrate the CAN communication is as below:-
History of CAN:
The initial development of CAN was started in 1993 by Robert Bosch GmbH and is officially released in 1986. In 1987 Intel has first introduced
the CAN controller chips.
Mercedes-Benz was the first OEM who implement the first CAN-based multiplex wiring system in their vehicle model
Mercedes-Benz W140. After that in 1991 Bosch published
its next version, CAN 2.0 which is divided into two parts, and in this revision extended
format of CAN with 29-bit identifier is introduced. Devices that work on 11-bit
identifier are known as CAN 2.0A and devices which works on
29-bit identifier are known as CAN 2.0B.
In order to provide standardization to CAN protocol, ISO(International Organization for Standardization) had released the CAN Standard
ISO 11898. Later on, this is
restructured into two parts; ISO 11898-1 which covers the data link layer, and ISO 11898-2 which covers the CAN
physical layer for high-speed CAN.
Also later on ISO 11898-3 was released which covers the CAN physical layer for low-speed, fault-tolerant
CAN.
Areas of application:
In the initial phase CAN was designed for the Automotive domain, but now a days it is also used widely in various other fields. Some of the area
of application of CAN is as below:-
- Modern Cars and Other Commercial vehicles like Buses, trucks etc.
- Medical equipments
- Railway control system
- Automation in manufacturing industries
- Aviation industry
- Shipping and maritime industry
Target Audiances:
This learning series has been prepared for the developers and engineers who are interested in Automotive domain or working on embedded system.